Skip to content
Absolute Limit Switch: A limit switch is positioned on the ventilator frame, and is activated when the hinged arm reaches its open position, corresponding to the maximum angle of the arm. The maximum angle corresponds to Ambu-bag size diameter of 7.5'', so that even very large bags are compatible with the design. Contact Limit Switch: A second limit switch is stationed on the compression arm so that it is activated when in contact with the Ambu-bag.
 Electrical Specifications
Electrical Specifications
Overview
This section details the electrical architecture of the system, which ensures proper power and connections to each sensor and electrical component. Again, simplicity and accessibility of commercial-off-the-shelf (COTS) components are emphasized. This ensures that the required components, or close alternatives, can easily be ordered from electronic components vendors.
System Diagram
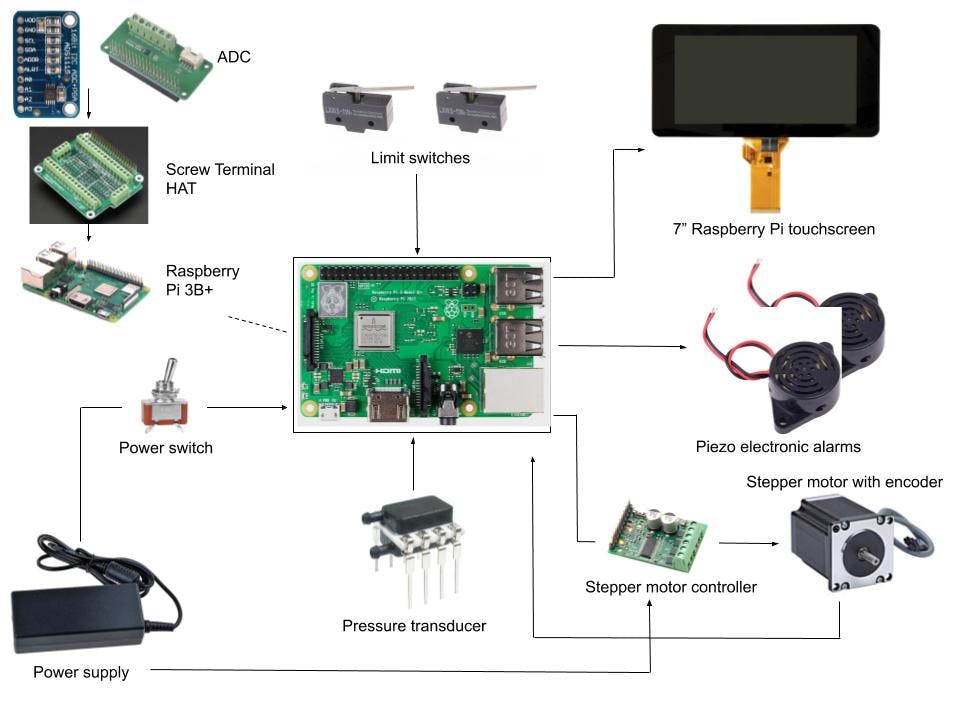
VentCU is controlled by a Raspberry Pi 3B+ microcontroller. The Raspberry Pi has a screw terminal breakout board (HAT) that connects via the GPIO header, allowing the sensors and wires to be fastened with a screwdriver instead of using wire headers or soldering.
Power
VentCU is powered by a standard AC (100-240 volt) wall socket, which is converted with a 5-volt DC adapter for the Raspberry Pi. A 12-volt DC adapter powers the Tic motor controller for use with the stepper motor. The machine is designed to stay connected to a wall outlet while in use.
Pressure Transducer
The pressure transducer used is a Honeywell differential pressure sensor which has an operating range of ±1 psi and an accuracy on the order of 0.2 cm H2O. The sensor has two inputs that interface with the plumbing, allowing the sensor to measure the pressure within the Ambu-bag. The plumbing system is further described in . Care should be taken to protect the pressure sensor from damage.
Because it delivers an analog output, the pressure transducer must be connected to an analog-digital converter (ADC). Our system uses an Adafruit ADS1115 chip with a soldered-on header, which feeds data to the Raspberry Pi through the screw terminal header. Alternatively, an additional 4-channel ADC HAT can be used as a solder-less option, further stacked on the GPIO header. This 4-channel ADC HAT also uses the ADS 1115 chip internally. More information about these parts can be found under .
Limit Switches
These limit switches are wired to GPIO screw terminals and are critical for the operation of the machine. Prior to operation, the switches are calibrated by using a homing procedure. Both limit switches are used when homing the ventilator to ensure that encoder readings are continuously checked for accuracy. See for details on the homing procedure.
Power Switch
An on/off power switch is included as an emergency stop switch. This switch is not directly connected to power. It uses a GPIO screw terminal and is intended to act as a physical emergency stop if needed. VentCU will not run if the emergency stop is activated.
Motor
The machine’s motor is a NEMA 23 stepper motor controlled with a Tic 36v4 stepper motor controller. The motor controller’s operating range is 8-50V and outputs a maximum 4A of current per phase without cooling. This controller connects to the Raspberry Pi via USB. More information about the motor can be found under . A motor encoder (AMT112Q) is attached to the motor, and feeds digital output to the Raspberry Pi.
Alarm
There are two alarms on the machine that are powered with GPIO terminals. Combined, they reach up to approximately 88 decibels. Loud alarms are necessary as COVID-19 patients are generally kept in isolated rooms. The alarms are triggered by the Raspberry Pi when sensors return improper data; various alarm conditions can be found under .
Leak Detection
The primary method of leak detection is via the pressure transducer, connected between the Raspberry Pi and the Ambu-bag's sensing port. A leak will result in failure to meet pressure targets, which will result in an alarm being activated. More methods of leak detection could potentially be added. For example, current sensing to monitor motor current consumption to protect against motor stalling or malfunction. Other methods could be used as well, such as a force sensor on the outside of the Ambu-bag or a color sensor pointed directly at a manometer. However, we found that a pressure sensor connected directly to the airflow was the most reliable method of leak detection.
Next: |
Want to print your doc?
This is not the way.
This is not the way.
Try clicking the ··· in the right corner or using a keyboard shortcut (
CtrlP
) instead.