Skip to content
EV3 vs Spike Prime? Lego changes the base brick every ~7 years and we’re going through the cycle now. If you’re planning for the future, you’ll probably want to use Spike Prime. Do you plan to have a box robot base? Box robots make it easier to add attachments.What type of wheels will you use? Wheels with less compression tend to be more accurate.How many sensors / which types of sensors will you use? We've found the light sensors to be the most useful (esp for line following) but some teams like to use the others. Will you use large or medium motors for driving and attachment? We generally recommend large motors for driving. For attachments, medium motors can work too, though we have generally found space for large ones to give us a bit more power.
Will you use the graphical environment or Python? Python tends to be more readable, easier to build functions, etc. Will you build any reusable functions / MyBlocks? The most useful ones tend to be a Line Following algorithm, a Line Alignment algorithm, and a Menu program for route picking.How will you backup code? Losing code sucks, and you want to be able to revert as well.
Where will your dedicate board setup be? While it’s technically possible to run a team without a dedicated game setup, we don’t recommend it. It’s a hassle, but usually one person on the team has to volunteer part of a room or garage to setup the game board. Also, working with Legos and trying to solve complicated tasks is not an easy feat, make it easier on yourself by decluttering to hone in your focus at the task at hand. Do we need to order any Legos? Do you have the right Legos for your team? We’ve talked to dozens of teams, and one of the places they get stuck is that they simply don’t have the right pieces to get started. We’ve found that the official Lego Spike Prime/EV3 kits are awesome, but they are not enough. Teams are then forced to live on Bricklink and other sites, acquiring pieces as they need them. If you get stuck on this, let us know and we’ll help advise you on the pieces you’re most likely to need.
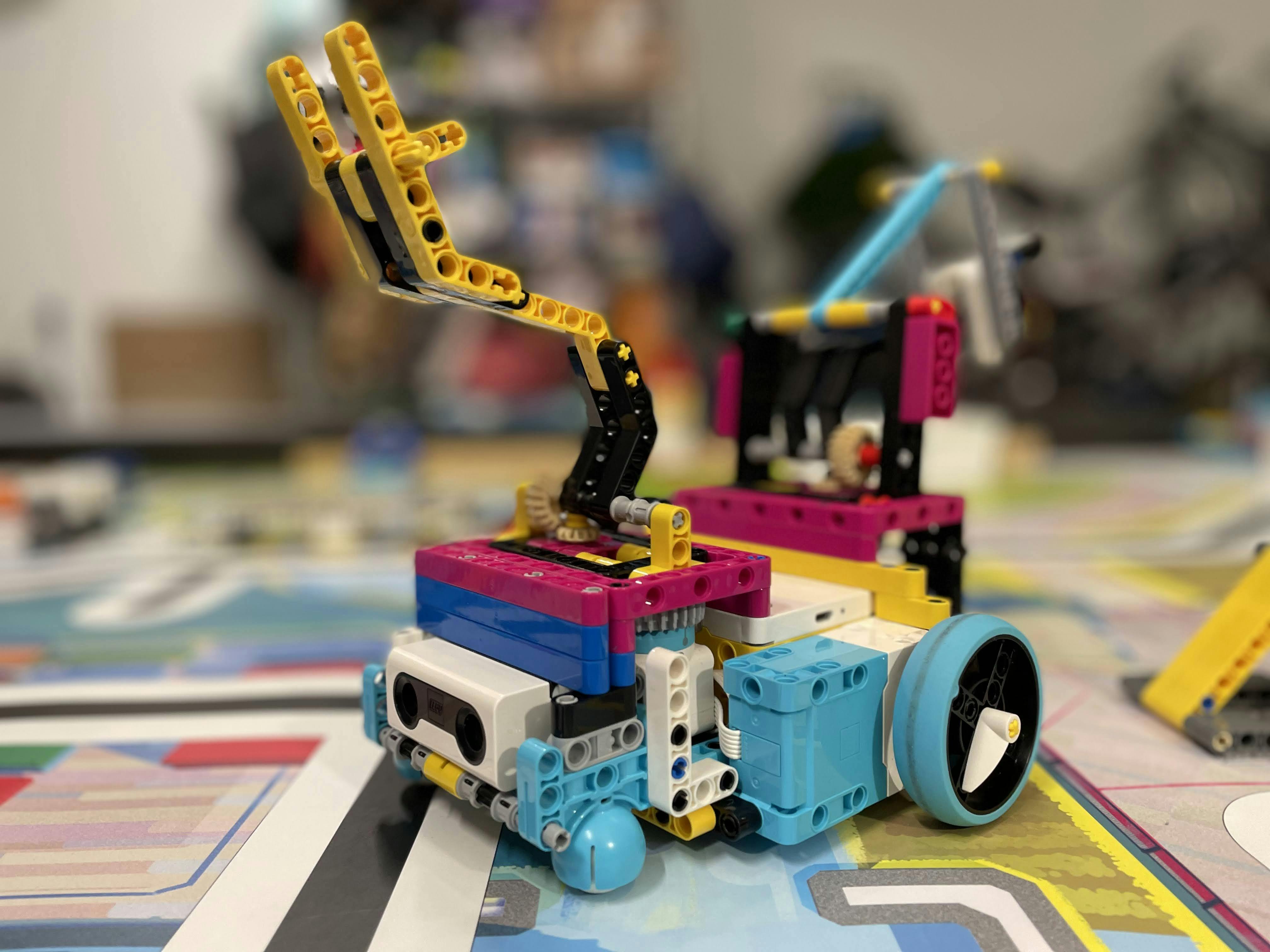
 Robot Design Considerations
Robot Design Considerations
Let's use this page to document key choices in the overall robot design.
Sensor Variabilities
Each Spike sensor is not completely accurate to the degree that we can ignore.
Here are a few observations about these sensors:
Distance sensor has a non-trivial variabilities with just 1 samples of the distance sensor

To reduce the amount of variabilities, we can use double sampling to reduce the the variabilities between measurements:

Let’s stretch out this logic to use up to 6 samplings and see how much reduction in distance measurement variabilities we can get:

From these experimental observations, we are leaning toward using double sampling as it does significantly reduce the variabilities. Only for extremely sensitive distance measurements (such as placing crates onto the moving dock) do we consider using 6 samples to get that extra accuracy of distance measurement.
Base Robot Design
Key questions to answer:
Base Programming Design
Key questions to answer:
Materials
Key questions to answer:
Want to print your doc?
This is not the way.
This is not the way.
Try clicking the ··· in the right corner or using a keyboard shortcut (
CtrlP
) instead.